dynamic laboratory
The dynamic laboratory – modeling, simulation and experiment adresses all students of the Technical Faculty of the Friedrich-Alexander-Universität Erlangen-Nürnberg. The aim of the practical course is to develop mathematical models of fundamental dynamical systems to simulate them numerically and compare the results to measurements from the real mechanical system. Here, the students learn both the enormous possibilities of computer based modeling and its limitations. The course contains one central programming experiment and six experiments at the real existing objects, including the corresponding numerical simulations:
• programming training
• beating pendulums
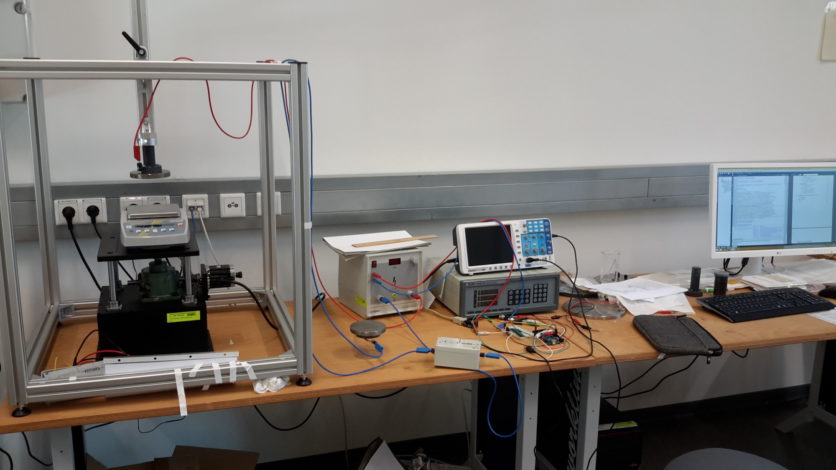
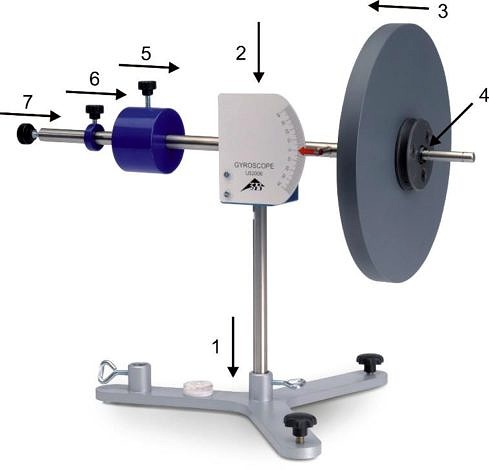
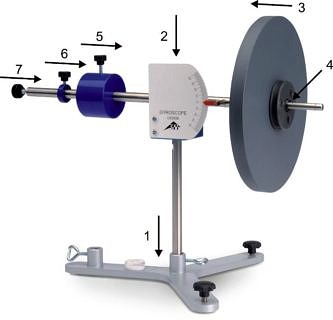
• gyroscope
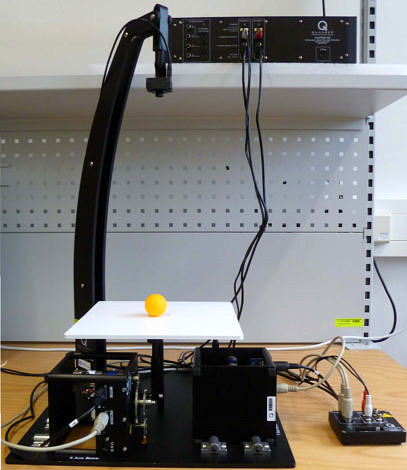
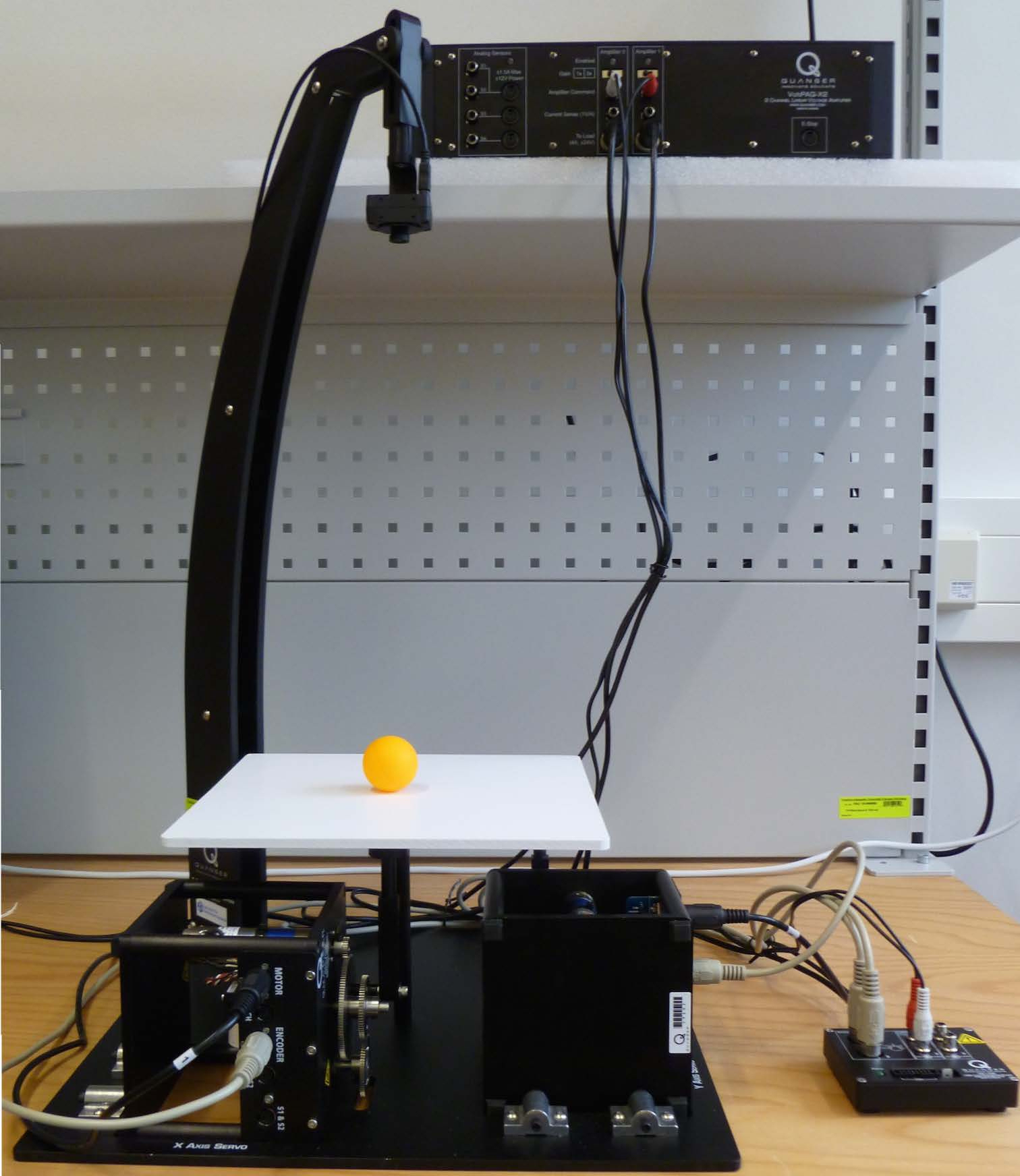
• ball balancer
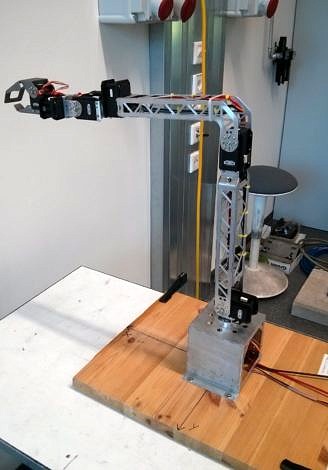
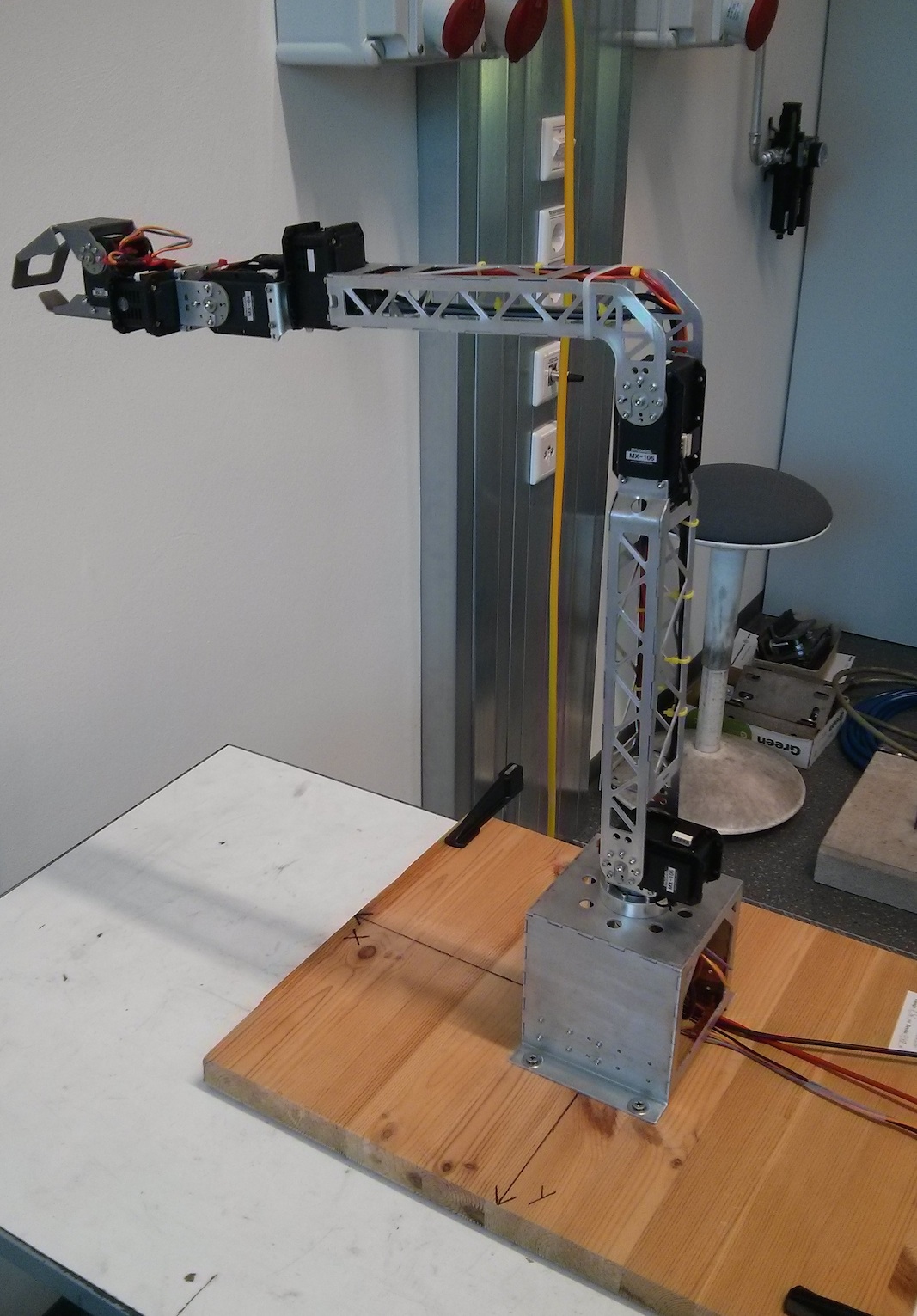
• robot arm
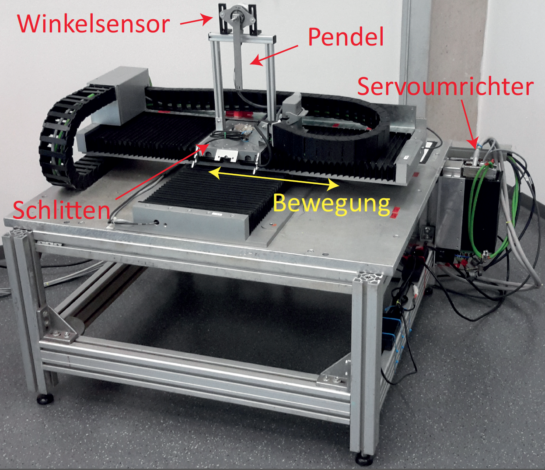
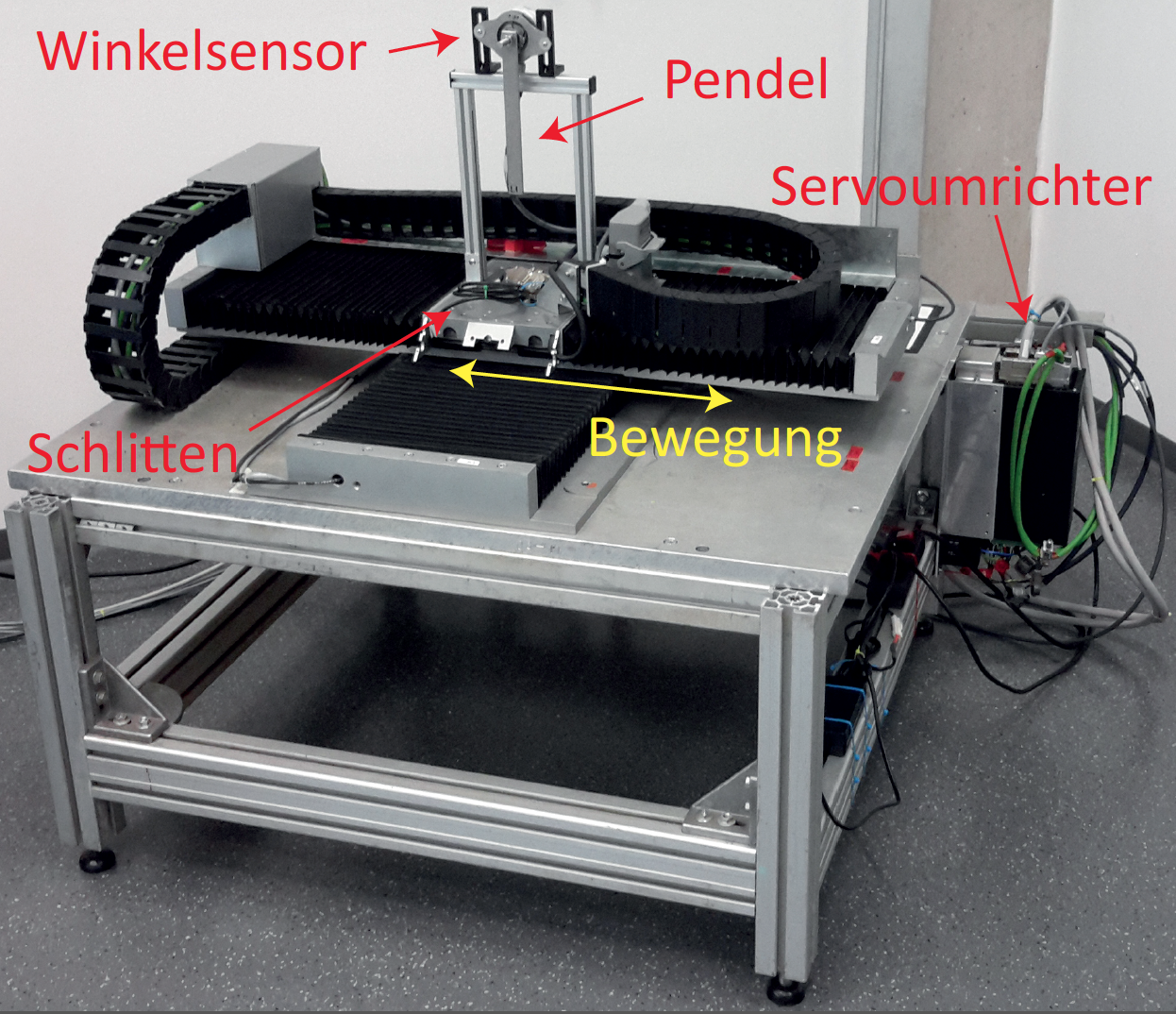
• inverse pendulum
• balancing robot